|
Главная | Проект под NDA | Контакты | ||||||
Наши проекты |
Для решения задачи раннего обнаружения возгораний наша команда разработала и отладила беспилотный летательный аппарат квадрокоптерного типа, который сможет занять свое место в системе пожаротушения практически любого промышленного объекта и универсален для интеграции с любым производителем пожарного оборудования.
Существующая практика заключается в том, что сканеры обнаружения возгорания устанавливают стационарно, и у них в силу угла обзора есть ограничение мониторинга элементов защищаемого объекта. Это накладывает ограничение использования каждой единицы оборудования, имеющего техническое зрение, в составе системы пожаротушения, интегрированной на предприятии. Чем больше объект, тем больше требуется установка сканеров и элементов детектирования обнаружения пламени. Пожарные стволы и другие стационарные элементы пожаротушения устанавливают в радиусе эффективной дальности струй и карт орошения защищаемых площадей и объектов. И если к каждому объекту, и/или на каждый стационарный элемент пожаротушения устанавливать сканеры - это существенно удорожает общую интеграцию, удорожает эксплуатацию, снижает общую надежность. Мы пересмотрели эту концепцию, и предлагаем альтернативу. И это - автономный летательный пожарный сканер. На представленной ниже карте облета можно увидеть, что одно воздушное судно может покрыть указанную площадь всего за 9 пролетов. Частота обновления актуальных данных о состоянии объекта на такой площади займет не более 1 минуты, а принимая во внимание, что раннее загорание предупреждается на стадии от 5 до 8 минут, можно сделать вывод, что передача данных в центральный пункт в режиме реального времени предоставляет достаточное время на развертывание элементов пожаротушения и локализацию обнаруженного нашим беспилотным аппаратом очага пожара. 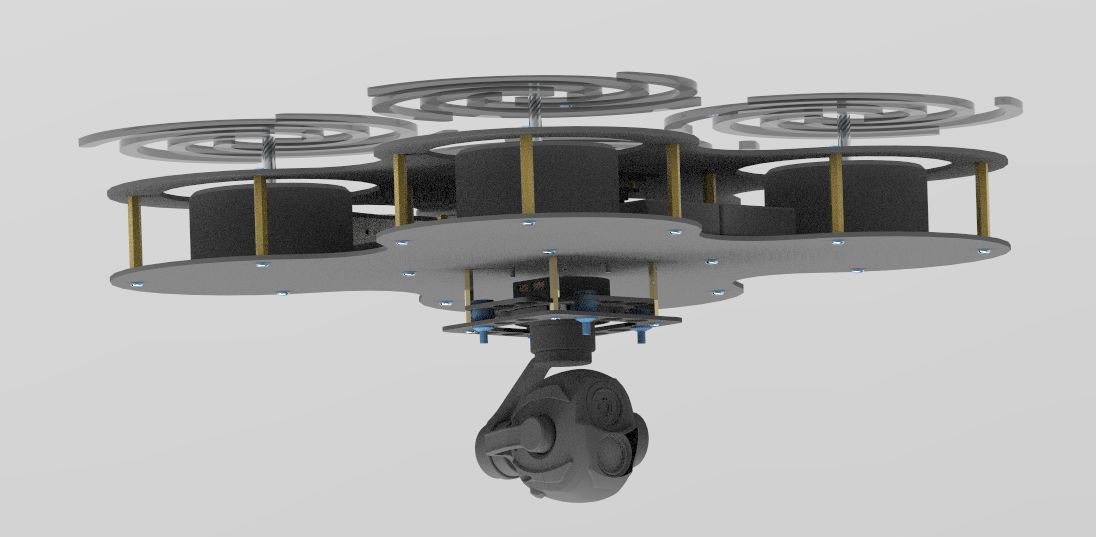 Так же есть несколько сценариев: либо наш автономный летательный пожарный сканер зависнет над обнаруженным местом возгорания, либо, отправив координаты обнаруженного очага в центральный пункт, продолжит маршрут своего дежурства.
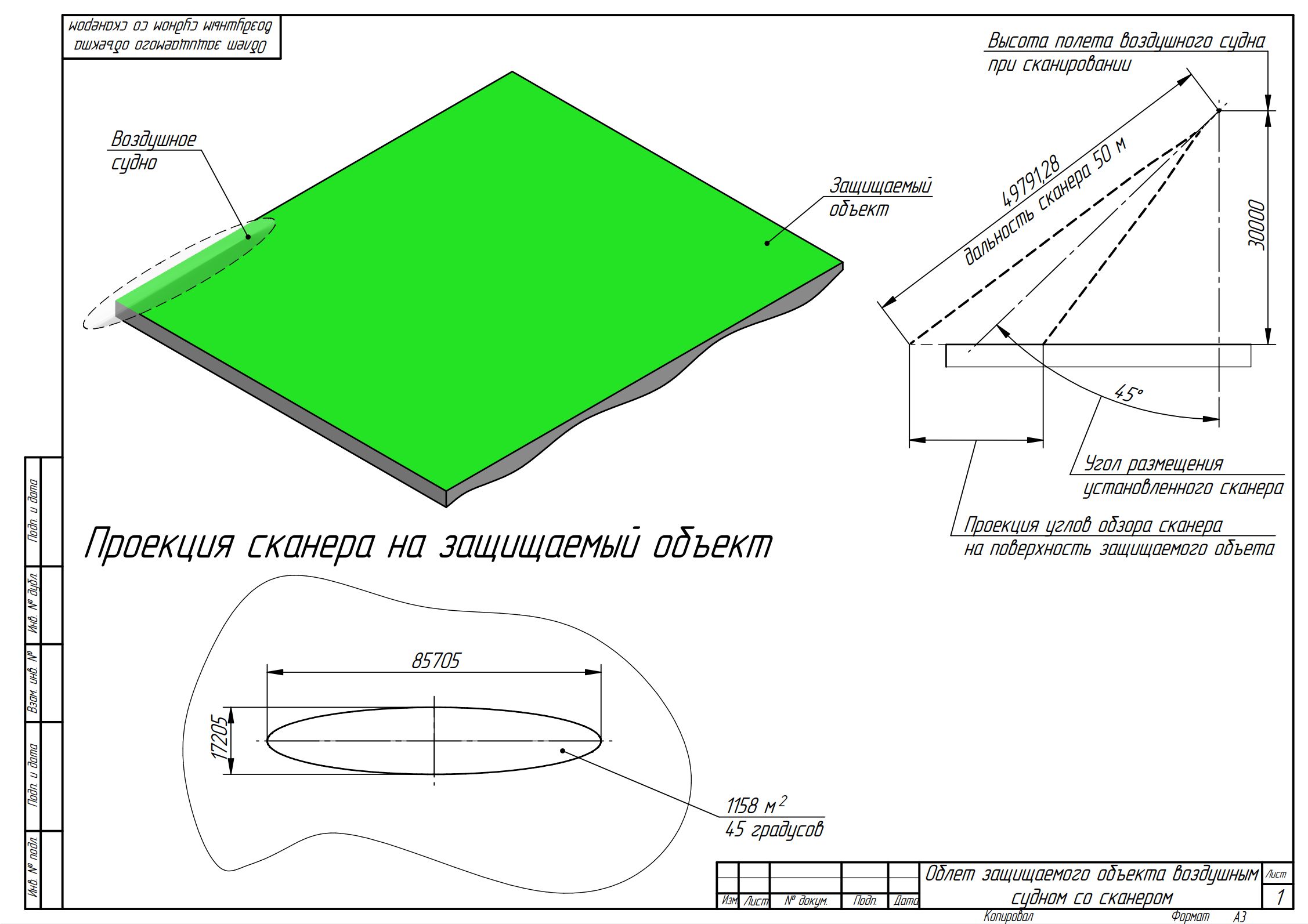  Отдельной частью проделанной работы в данной разработке было обеспечение стабильной точности позиционирования беспилотного летательного аппарата. Мы должны были обеспечить минимальное гарантированное перекрытие ширин пролетов, чтобы минимизировать количество пролетов (для ускорения сканирования всего объекта), но при этом гарантировать отсутствие "слепых зон" сканирования. Мы добились точности позиционирования нашего воздушного судна до нескольких десятков сантиметров. Это хороший показатель для системы позиционирования GPS. На данный момент мы разрабатываем собственное пользовательское ПО для удобства настройки сценариев пролета над защищаемыми объектами. |
||||||
|
© 2026 — «METAFERRUM»
ООО «МЕТАФЕРРУМ»
|
|||||||